 |
Fove SDK
v1.3.1
|
|
Fove SDK
v1.3.1
|
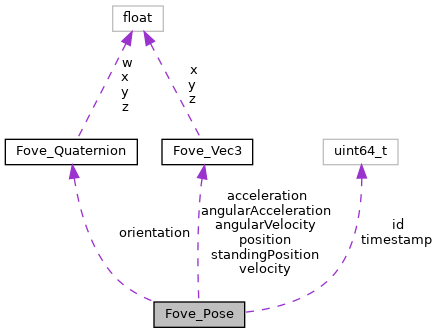
Struct to represent a combination of position and orientation of Fove Headset. More...
#include <FoveAPI.h>
Public Attributes | |
| Fove_Vec3 | acceleration = {} |
| The acceleration of headset in 3D space. | |
| Fove_Vec3 | angularAcceleration = {} |
| The angular acceleration of the head. | |
| Fove_Vec3 | angularVelocity = {} |
| The angular velocity of the head. | |
| uint64_t | id = 0 |
| Incremental counter which tells if the coord captured is a fresh value at a given frame. | |
| Fove_Quaternion | orientation = {} |
| The Quaternion which represents the orientation of the head. | |
| Fove_Vec3 | position = {} |
| The position of headset in 3D space. Tares to (0, 0, 0). Use for sitting applications. | |
| Fove_Vec3 | standingPosition = {} |
| The position of headset including offset for camera location. Will not tare to zero. Use for standing applications. | |
| uint64_t | timestamp = 0 |
| The time at which the pose was captured, in microseconds since an unspecified epoch. | |
| Fove_Vec3 | velocity = {} |
| The velocity of headset in 3D space. | |
Struct to represent a combination of position and orientation of Fove Headset.
This structure is a combination of the Fove headset position and orientation in 3D space, collectively known as the "pose". In the future this may also contain acceleration information for the headset, and may also be used for controllers.